03Vision
近未来プロジェクト

PROJECT B国産初の手術支援ロボット「hinotori」
開発プロジェクト
PROJECT B
PROJECT B
尊い命と向き合う医療の現場を、
新たな地平へと導いてゆけ。
日本の医療を救う、
国産初の手術支援ロボット。
CHAPTER
01
01
国産初の手術
支援ロボットとは?!
2020年12月14日。日本の医学史に新たな1ページが刻まれたその日、精密機械・ロボットカンパニーの山守と圡井は、神戸大学医学部附属病院にいた。2人は別室で手術室の様子を見守りながら、「ついにここまできたか…」と胸からこみ上げるものを抑えきれなかった。
この日、手術室で用いられていたのは、「hinotori™ サージカルロボットシステム」。川崎重工とシスメックスが折半出資で設立したメディカロイド社によって開発された、手術支援ロボットだ。
そもそもの始まりは、2013年にさかのぼる。産業用ロボットで世界に冠たる技術を誇る川崎重工と、医療分野に幅広いネットワークを持つシスメックスが、「双方の強みを掛け合わせることによって、医療の世界に新たな価値を提供したい」という想いのもと、メディカロイドを設立。その存在意義を世に示す主軸製品の第一号に選んだのが、「手術支援ロボット」だった。
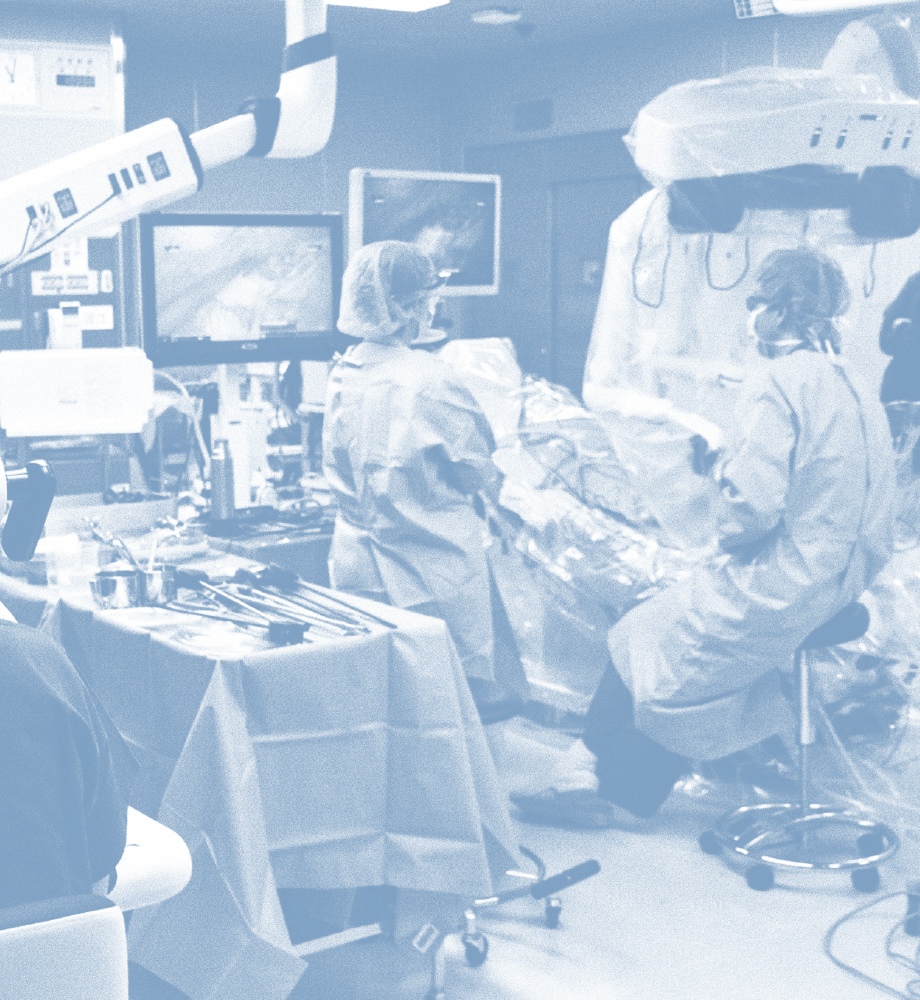
手術支援ロボットとは、医師がカメラの映像を見ながら、内視鏡と鉗子を手にしたロボットアームを操作して手術を行うという医療用ロボットだ。技術やアイデアのベースとなったのは、テレビモニターを見ながらデバイスを用いて治療を行う「腹腔鏡手術」を、執刀している医師達からの意見。「腹腔鏡手術」は、患者の負担を軽減する「低侵襲手術」として広く普及したが、腹腔鏡手術用の鉗子の動きは直線的で柔軟性に欠け、画像も2Dで、かつ視野角に限界がある点で課題を抱えていた。
一方、手術支援ロボットは、多関節をもつロボットアームを用いるため、動きの自由度が高い。画像も3Dで奥行きがつかみやすく、医師は「自身の腕と手の動き」や「自身の目」に近い感覚のもとで施術を行うことが可能とあって、次世代医療を担うシステムとして世界で注目されている。現在、その手術支援ロボットで市場を独占しているのが、米インテュイティブサージカル社の「ダビンチ」だ。1999年に発売、2000年にFDA(米国食品医薬品局)の承認を取得して以降、世界で約5500台が稼働。いまや年間120万件を超える施術を行っているという。
メディカロイドは、その巨人ダビンチの独占市場に挑もうと考えた。産業用ロボットで世界シェアの約半分を握る日本の繊細なモノづくりによって、新機軸の手術支援ロボットを生み出し、医療をまた新たな地平へと導きたい──と。そして2015年、開発プロジェクトが始動。山守や圡井ら、ロボット開発の最前線で活躍する精鋭メンバーがアサインされ、新たな創造に向けたチャレンジはスタートした。しかしそこに待っていたのは、彼らの想像を超える苦難の道のりだった。
目指すは「ヘリコプター」と
「スポーツカー」のありよう。
CHAPTER
02
02
「hinotori™」という名前は、手塚治虫氏の名著『火の鳥』に由来する。不死鳥を通じて命の尊さと向き合い続けた手塚氏のように、命と向き合う医療従事者を支援したいという想いを込めて命名された。その想いを共有する山守や圡井ら開発メンバーは、いずれも川崎重工で最先端の産業用ロボットを手がけてきた技術者たちだ。彼らの確かな技術力と熱い想いは、プロジェクト始動からほどなくして、一粒のぶどうの皮をむくレベルの手技を実現するに至った。メンバーは順調な滑り出しに手応えを感じたが、「医療」の世界はそう甘くはなかった。
「これでは合格点にはほど遠い」、それが手術の現場に立つ医師から受けた評価だった。メンバーは、目指すゴールが、求められるものと大きく乖離していることを知る。いったいどこがどう違うのか──。工学の専門家と医療の専門家、それぞれバックグラウンドも共通言語も異なる者同士が対話を重ね、目指すべきゴールの焦点を合わせていく。ヒントになったのは、医師から例示された「ヘリコプター」と「スポーツカー」のありようだった。
産業用ロボットは異常が発生したら止めればいい。しかし手術ではそういうわけにはいかない。たとえトラブルが発生しても、ギリギリまで操縦者の思い通りに動くヘリコプターのようであってほしい。また、工学の専門家は「切れすぎる包丁は危険だ」として無難なものを目指しがちだが、外科医にしてみれば「切れすぎる包丁を使いこなす」自信がある。そのため、高い性能を誇り、俊敏な応答性を備える一方で、ドライバーの運転テクニックに応える冗長性も併せ持つ、いわば高級スポーツカーのようであってほしい。
このたとえは、今の課題を明らかにするとともに、それをどう解決すればいいのかを開発メンバーたちに明確にイメージさせた。工学の専門家と医療の専門家が、同じゴールを見据えて焦点を合わせた。ここからが、本当の開発プロジェクトの始まりだった。

18兆回に及ぶ、
執念のシミュレーション。
CHAPTER
03
03
医師の助言をもとに導き出した「hinotori™」の開発コンセプトは、「コンパクト性」と「高い安全性」、そして「意のままに操れる操作性」の3つ。なかでも、大きな特徴となる「コンパクト性」は重要な開発要件だったが、これが開発における大きな壁となった。「コンパクト性」と「広い動作範囲」の両立が困難を極めたのだ。
「hinotori™」が持つアームは4本。その先端に、内視鏡や鉗子といった「インストゥルメント」と呼ばれる器具がセットされる。1本のアームは、アーム部分が8軸、各インストゥルメントが4軸の、合計12軸で構成されている。一般的な産業用ロボットの6軸に比べ、倍の自由度を備えたアームだ。この多関節機能によって豊かな冗長性を提供しながら、執刀医に代わって「見る」「潜り込む」「つかむ」「切る」「縫う」といった動作を微細に行うわけである。
だが一方で、それだけ自由に動く4本のアームがコンパクトに配置されていると、互いに干渉し合うリスクを高めることにもなる。手術中にアームがぶつかり停止してしまえば、思わぬ事故にもつながりかねない。それが、制御手法の開発を担当した山守を大いに苦しめた。イメージするとわかるが、体に開けた穴の位置をずらすことなく、手術に必要な領域にアームの先端を持っていこうとすると、手前のアームには広い動作範囲が必要になる。それでも互いに干渉することなく、それぞれのアームの位置や関節の状態を考慮して制御するには…。
極めて複雑な制御の実現を求められた山守は、執刀医の協力のもとでトライ&エラーを繰り返した。実際の手術を見学して執刀医の腕や手の動きを観察したり、コンピュータでシミュレーションを試みたりしながら、根気強く最適な制御ルールを探っていく。シミュレーションに至っては、実に18兆回を数えた。万が一にも、いや、兆が一にもエラーを起こしてはいけないという、「一人の人間の“命”と向き合うロボット」を作る山守の執念ともいえる使命感だった。

サポートできるのは世界初の技術で、より高い安全性を確保している
求められたのは、
まるで浮いているような操作感。
CHAPTER
04
04
難題はこれだけではなかった。開発コンセプトの一つである「意のままに操れる操作性」については、医師から想像を超えるリクエストが提示された。「何もないくらいの、まるで浮いているような操作感がほしい」というのだ。機械設計を担当した圡井は、そう聞いて頭を抱えた。この感覚的な要望を、工学的にどう実現すればいいのか…。模索が始まった。
手術支援ロボット「hinotori™」は、医師がロボットを操作する「サージョンコックピット」と呼ばれる操作台を備える。3D内視鏡画像を見ながら、2本のハンドコントロールやフットスイッチなどでロボットを操作するのだが、この手に握るハンドコントロールが、まさに「意のままに操れる操作性」に直結する重要な部分となる。
圡井は、試作をしては評価、改善を繰り返し、「浮いているような操作感」を目指して試行錯誤を重ねていく。そして、難題解決のポイントが減速比にあることを探り当てた。モータと減速機の摩擦が大きくなれば、それだけハンドコントロールの感触が重くなる。そこで、減速機の減速比を低くし、摩擦を減らすようにした。加えて、ソフトウェアによる感覚補正も追加。メカの設計とソフトの制御、その両方を組み合わせることで最適な操作感を作り込んでいった。
残る開発コンセプトの「高い安全性」については、二重の動作監視安全システムを導入した。まず、3Dビュアーのセンサーが「執刀医が覗き込んでいる」と検知しない限り、ロボットが動作しない仕組みとした。また、アーム同士が干渉した場合は、執刀医にアラーム音で通知するよう設定。仮にアーム同士が干渉したり、アームの動作範囲限界に到達したりしても、熟練した執刀医による細やかな操作により、手術を継続できるシステムに仕上げた。
こうして難題を乗り越え、国産初の手術支援ロボット「hinotori™ サージカルロボットシステム」は、3つの開発コンセプトをすべて実現したかたちで完成した。

3D内視鏡画像を見ながら、2本のハンドコントロール、フットスイッチなどでロボットを操作する。
hinotoriの可能性。
CHAPTER
05
05
そして迎えたのが、冒頭の2020年12月14日である。この日、神戸大学医学部附属病院国際がん医療・研究センターでは、「hinotori™」を用いた初めての手術が行われ、みごとに成功を収めた。手術を執刀し、「hinotori™」の開発アドバイザーも務めてきた藤澤正人・神戸大学医学研究科長(現・神戸大学学長)は、記者会見の場で「手技そのものは100点満点と言っていいでしょう」と評価し、新しい医療機器を社会に実装できたことに「感無量」と語った。
その言葉を聞いた山守や圡井ら開発メンバーは、苦労の連続だった数年間にわたる開発の日々が、すべて報われた思いがした。「医療の世界に新たな価値を提供したい」という、仲間と掲げた目標。その達成に向けた記念すべき第一歩を確かに刻んだという達成感で、胸がいっぱいになった。
一例目の手術を成功に収めた「hinotori™」は、すでに全国の病院で採用され、100症例以上の手術を完遂している。着実に実績を重ねる「hinotori™」だが、実はまだ羽を広げて地から空中へとわずかに舞い上がった程度に過ぎない。大いなる進化の可能性を秘めているのだ。
なかでも最も期待されているのが、遠隔手術の実現である。リアルタイム伝送することにより、遠く離れた場所の患者に対してタイムラグなしに遠隔手術ができるようになる。「hinotori™」が目指しているのは、誰もが等しく良質な医療を享受できる社会だ。手術支援ロボットと超高速通信回線が広く社会に普及すれば、専門医が常駐していない地方の町でも、海を隔てた辺境の地でも、高度な手術を受けることができる。コロナ禍で再認識させられた医師不足という課題に対しても、一つの解決策を提示できる。
「hinotori™」の飛翔は、これからが本番である。近い将来、その羽をいっぱいに広げ、大空高く舞い上がった時、「hinotori™」は尊い命と向き合う医療の現場を、新たな地平へと導いているにちがいない。